Información general
Frecuencia Modulada (FM) es una forma de modulación en que los cambios en la frecuencia de la onda portadora se corresponden directamente con los cambios en la señal de banda base.Esto se considera una forma de modulación analógica, ya que la señal de banda base es generalmente una forma de onda analógica sin valores discretos, digital. Esta simulación está diseñado para ilustrar la teoría detrás de la modulación de frecuencia, e introducir aspectos prácticos de su aplicación.
Aplicaciones comunes:
FM es más comúnmente utilizado para la radiodifusión sonora y televisión. De hecho, radio FM, MHz a 108 MHz, utiliza la modulación FM para transmitir señales de audio.Cada estación de radio utiliza una banda de frecuencia de 38 kHz para transmitir audio.Televisión analógica implementa la modulación FM. De hecho, los canales de televisión del 0 al 72 utilizan diversos anchos de banda entre 54 MHz y 825. Este ancho de banda se utiliza para una variedad de tecnologías, que también incluye radio FM.
Antecedentes matemáticos:
El principio básico detrás de la modulación FM es que la amplitud de una señal de banda base analógica puede ser representado por una frecuencia ligeramente distinta de la compañía.Matemáticamente, se representa esta describiendo los pasos necesarios para modular la frecuencia de una portadora sinusoidal.
El proceso matemático real para modular una señal de banda base, m (t), sobre el vehículo requiere un proceso de dos pasos. En primer lugar, la señal de mensaje debe estar integrado con respecto al tiempo de obtener una ecuación para la fase con respecto al tiempo, Ө (t). Esto permite que el proceso de modulación por modulación de fase es bastante sencillo. Con los típicos circuitos modulador IQ. Una descripción diagrama de bloques de un transmisor de FM se muestra a continuación:
Como el diagrama de bloques anterior muestra, la integración de un mensaje de los resultados de la señal en una ecuación para la fase con respecto al tiempo. Esta ecuación se define por la siguiente ecuación:
Una vez más, la modulación resultante es modulación de fase, que consiste en cambiar la fase de la portadora a través del tiempo. Este proceso es bastante sencillo y requiere de un modulador de cuadratura, se muestra a continuación:
Demostración:
La siguiente demostración se introducen los aspectos más prácticos de la modulación de frecuencia y se examinará el efecto de la frecuencia de la portadora y la desviación de FM en la señal resultante FM.
1. En primer lugar, abrir el ejemplo "FM Modulation.VI" y ejecutar el programa. Tenga en cuenta que hay tres parámetros básicos que vamos a ajustar. En primer lugar, la 'Banda de frecuencia "se ajusta la frecuencia de la señal de mensaje que deseamos enviar. En segundo lugar, la frecuencia portadora es la frecuencia que vamos a utilizar para llevar nuestra señal de mensaje. Por último, la desviación de FM determina la diferencia de frecuencia entre la mayor frecuencia instantánea de la señal modulada y la frecuencia de la portadora. En este paso, ajustar la frecuencia de banda base y observar el efecto en el gráfico titulado onda modulada FM.
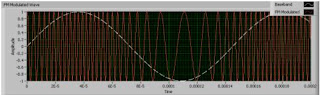
2. A continuación, vamos a experimentar con la frecuencia de la portadora y observar el efecto en la señal de FM modulada. Aviso, que la frecuencia de la portadora es el equivalente a la frecuencia de la banda. Además, la desviación de frecuencia también se ajusta automáticamente de modo que nunca es mayor que la frecuencia de la portadora.A continuación, se muestra un escenario donde la frecuencia de la portadora es igual a la frecuencia de la banda. Debido a que estas frecuencias son idénticas, la señal modulada FM no es sinusoidal pura.
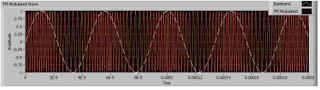
A medida que la imagen de arriba muestra, la señal de banda no puede ser bien representado en este escenario. Idealmente, la frecuencia de la portadora debe ser sustancialmente mayor que la frecuencia de la señal de banda base. En el siguiente gráfico, se muestran los resultados del aumento de la frecuencia portadora. Aquí, usted puede ver que el período completo de cada frecuencia se representa.
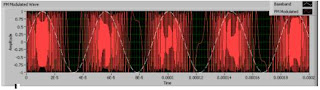
3. Por último, se observa el efecto del índice de modulación de la señal de FM. Para ello, ajustar la frecuencia de la portadora a su máximo, de 1 Mhz. Usted se dará cuenta de que la desviación FM máxima ha sido automáticamente ajustado a 500 kHz. Deslice el control deslizante de la desviación de FM a la máxima, de 500 kHz y observe los resultados.Como se puede ver en el gráfico siguiente, que la frecuencia de la señal de tiempo de dominio resultante muestra una variación sustancial. De hecho, como ilustra el gráfico, el nivel mínimo de la señal de banda base están representados por 0 Hz. Además, el máximo nivel de la señal de banda base está representado por 2 MHz.
Mientras que la desviación FM significativo es visualmente evidente, más pequeños valores de la desviación de FM no lo son. Para observar esto, cambiar la desviación de FM y 200 kHz. En este contexto, los distintos niveles de la señal de banda base estará representada por las frecuencias que van desde 800 kHz a 1,2 MHz. El dominio del tiempo de la onda modulada se muestra a continuación:
Como el gráfico anterior, los cambios en la desviación de frecuencia es menos evidente en el dominio del tiempo. Sin embargo, es importante observar su efecto en un sistema de comunicaciones. Idealmente, un sistema de comunicaciones debe tener una desviación máxima frecuencia para representar con mayor precisión la señal de banda base. Sin embargo, esto no está exento de desventajas. Mediante el aumento de la desviación de frecuencia, también aumentamos la potencia necesaria para generar la señal y el ancho de banda de frecuencia que ocupa.
4. Por último, haga clic en el "dominio de la frecuencia" para ver un espectro de potencia FFT de la señal modulada. Mientras estés viendo este gráfico, poco a poco ajustar la variable de desviación de la frecuencia y observar el efecto en el ancho del canal. Te darás cuenta de que cuanto mayor es la desviación de frecuencia, el ancho de banda mayor que el canal ocupa. A continuación, se muestra una señal de FM con una portadora de 1 MHz y una desviación frequncy de 500 KHz. Como se puede observar en el gráfico siguiente, la señal modulada ocupa más de 1 MHz de ancho de banda
Conclusión:
Frecuencia Modulada (FM) es un esquema de modulación importante tanto por su uso comercial generalizado, y debido a su simplicidad. Como hemos visto en este documento, la modulación de frecuencia se puede simplificar a la modulación de fase con un integrador de simple. Como resultado, las señales de frecuencia modulada, se pueden generar con el generador de señales vectoriales de National Instruments, ya que no requieren más que un modulador IQ.
Descarga:
Nombre de archivo: fm_modulation.vi
Software de Aplicación: Sistema LabVIEW Full Development 7.1
Fuente : http://zone.ni.com































